
Home | 連絡先・所在地・アクセス | リンク

2023年1月の記事一覧
ロボット工学科3年生による課題研究発表会が行われました
投稿日時 : 2023/01/23
 ロボット工学科
ロボット工学科
1月19日(木)の午後、視聴覚室にてロボット工学科3年生による課題研究発表会が行われました。

以下に研究内容を掲載します。
1班 「小型自動販売機の製作」

PLC制御を用いた自動販売機の製作。硬貨を入れるとランプが点灯し、欲しい飲み物のボタンを押すと往復スライダ・クランク機構により商品が押し出される。
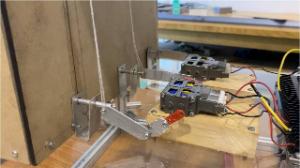
2班 「自動アルコールディスペンサーの製作」

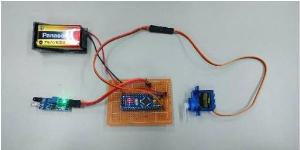
赤外線センサに手をかざすとサーボモータが既定の角度まで回転し、ボトルのポンプが押されることで少量のアルコールが噴射される。その後、自動でサーボモータが元の位置まで回転しボトルのポンプを引き上げることで一連の動作が完了となる。
3班 「オーバーフロー水槽の製作」


オーバーフローシステムを塩ビ管と水中ポンプで再現した。また濾過槽は三層にわけ濾過能力をさらに高めた。ペルチェ素子を用いた水温制御も行った。
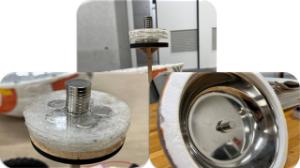
4班 「潜水艦の研究」

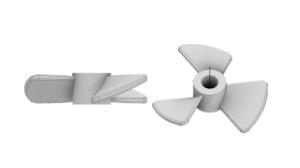
水中で動作させるためにブラシレスモータを採用し、プラスチック製の注射器を用いて艦内に水を取り入れ、浮力を調整する。スクリューは 3DCAD を用いて作成した。
5班 「自立歩行ロボット」

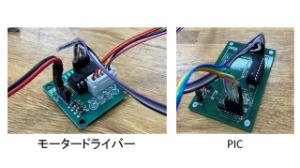
ステッピングモータを使用し、制御にはPICを使用した。PICからの微弱な電気信号をモータドライバーが受け取り、増幅しステッピングモータに流し、モータを制御している。リンク機構を用いて、ジョイントでの回転運動を直線運動に変換することで前進、モータが逆転すると後進する。
6班 「BB-8の製作」

micro:bitによる無線通信による操作が可能。下の球体の中の4輪の車による重心の変化によって転がる。上の頭は、下の車に設置された磁石に反応しながら常に真上に位置するため転がっても落下しない。
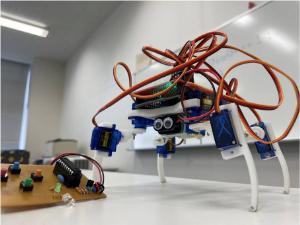
7班 「六足歩行ロボットの製作」

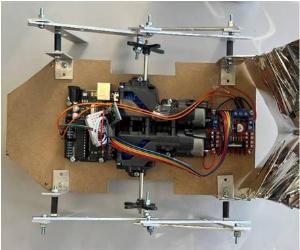
サソリを模倣した六足ロボット。Bluetooth通信によりスマートフォンでの操作が可能。アルミの薄板を折り紙の要領で加工し、サソリをイメージした外装にした。メンテナンスがしやすいように開けられる構造にした。
8班 「植物工場の製作」


土壌湿度センサにより土壌の湿度を測定し、ホースで繋がれたタンクから電動ポンプで湿度に応じた量をくみ上げ、散水することで土壌湿度を一定に保つことが出来る。光合成制御システムとして植物育成に有用な、赤色と青色の2色のLEDを設置した。
9班 「クレーンゲームの製作」

ボタン操作によりアームを景品の上に移動させ、下降上昇後、原点位置に戻るようにプログラムした。景品とアームの先端に磁石がつけてあるため、近づくと磁力により持ちあげることが出来る。
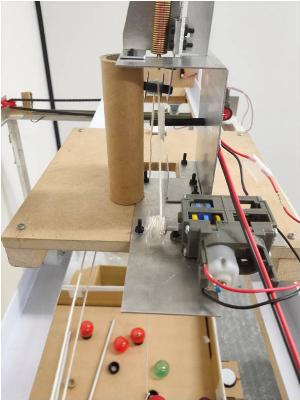
10班 「エアーホッケーの製作」


木材と塩化ビニル板で製作した密閉された本体に、エアブローを用いて空気を送る。本体の中で圧縮された空気が1025個の穴から放出されることでパックが浮き、摩擦を無視してゲームを行うことが出来る。ゴール内に赤外線センサを取り付け、パックが入ると得点板に反映される。
11班 「自作タイムブロッキングコンテナの製作」

スタートボタンを押したら一定時間蓋が開かず、中の物を取り出すことが出来ない。指定した時間が経過すると、接続しているソレノイドに電流が流れることによって蓋の固定を外し、ばね蝶番のバネで蓋が自動的に開く。
12班 「四足歩行ロボットの製作」

サーボモータという角度を調節することが出来るモータを8個使用し、独特な動きによって歩行する。外径は3Dプリンタによって製作し、赤外線を使ってリモコンからロボットに信号を送り、動かすことが出来る。